Spatial Intelligence
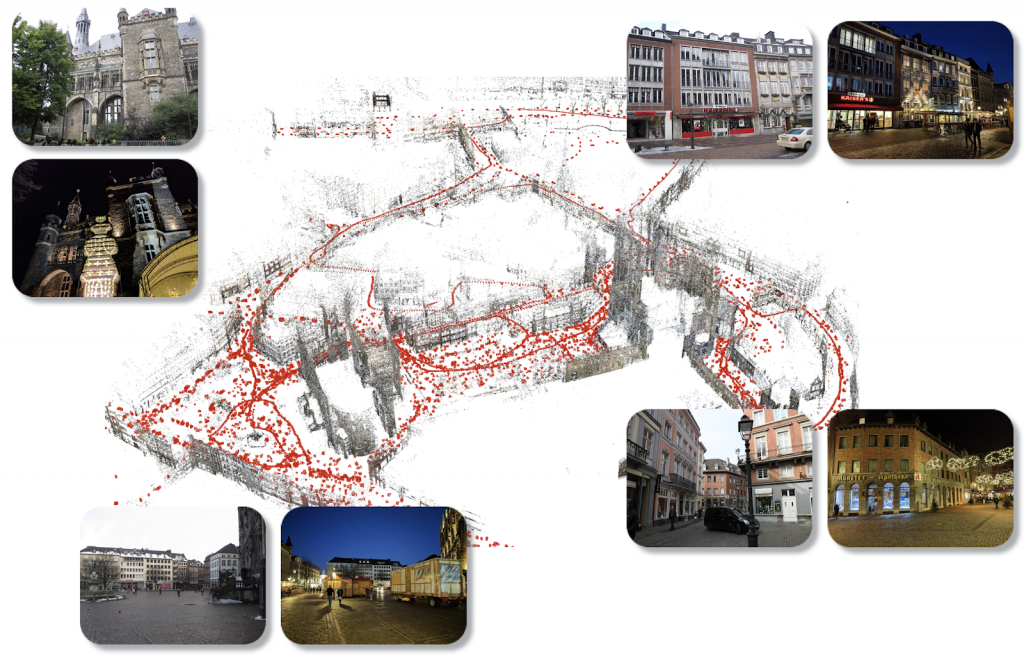
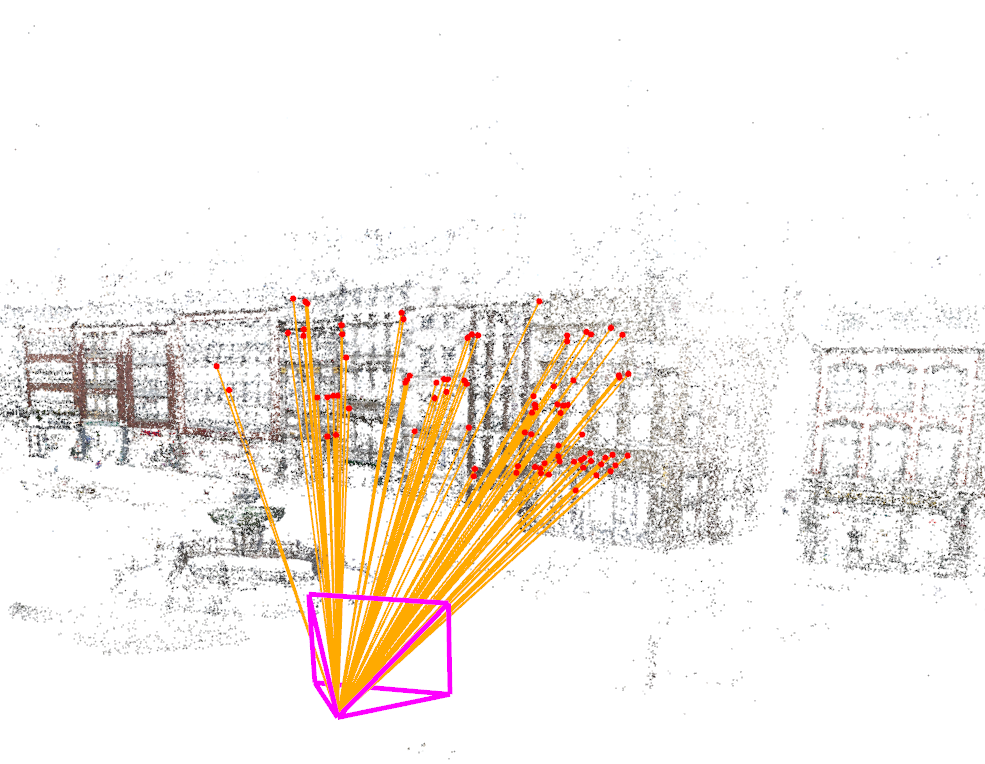


Our goal is to develop the next generation of 3D computer vision algorithms, e.g., for 3D mapping and visual localization, that can operate robustly and reliably in real-world scenes. To this end, we work on combining classical geometric principles and classical 3D vision algorithms with state-of-the-art machine learning techniques.
Research topics include
- visual localization and 3D mapping / reconstruction
- neural rendering and implicit scene representations
- using 3D data for weakly supervised machine learning (local features, semantic scene understanding, etc.)
- 3D computer vision
Applications
Applications of our research include enabling the next generation of autonomous robots that need to operate in the same space as humans (and need to interact with scenes) and augmented and virtual reality systems.
Team
Torsten Sattler
Kunal Chelani (Chalmers University of Technology)
Vojtech Panek
Maxime Pietrantoni
Contact Person

Torsten Sattler
torsten.sattler@cvut.cz